|

|
 |
Profile: Mike Petersen
|
 |
|
|
|
|
| Bio |
![]() |
Tips |
![]() |
Bots |
![]() |
|
|
|
|
|
|
| LiftBot -
Feb. 23, 2001 |
|---|
| Image Not Available |
This bot was my first BattleBrick, and the first in a series of lifting bots. It used 8 15-hole liftarms in a scissor-lift configuration, linking a central module (with RCX and lifter motors) with two drive modules (each with a motor and drive wheels). Pinion gears moved beams with rack gears attached, resulting in linear motion to operate the scissor lifts. Rubber bands on the liftarms aided the lifting capability and helped to compensate for the RCX & motor weight in the center module.
Steering was a traditional tank-style control. Since the bot was built with lifting forks at both the front & back ends, the control program was written so that a single button remapped the message handling to swap "forward" and "reverse". This greatly simplified learning to drive the bot well, and meant that it could handle opponents "behind" it without having to turn around.
Although this bot was functional, imposing and crowd-pleasing, the liftarms & rubber bands proved vulnerable in the arena (as the pictures show). |
| SuperLiftBot -
May 22, 2001 |
|---|
| Image Not Available |
Although I had partnered with Gregg Steuben, other priorities prevented him from taking him an active role in the design & construction of our Team Bot. With two RCX's and plenty of additional parts, I constructed the largest (I believe) mobile bot to date.
Similar to the original LiftBot, this featured a central lifting module that was symmetric front & back. This bot, however, used rack gears on four towers to support worm-gear-driven pinions. Each pair of towers had a separate motor driving its worm/pinion system, with a chain synchronizer across the bottom to maintain level lifting regardless of load.
Although slow to lift (due to the worm gears), it was implacable -- once pinned against the wall, no escape was possible. This bot achieved its goal of being able to eject opponents from the arena -- by hoisting them over the walls. The only damage sustained throughout the battle was the loss of one rack gear on one tower to Will Gorman's PuncherBot. |
| GoalBot -
July 11, 2001; Feb. 2, 2002 |
|---|
| Image Not Available |
For our first Soccer Battle, the only rule for the battle was that each bot had to fit on an 8.5" x 11" sheet of paper at the start of the battle. I again partnered up with Gregg to create a winning team; Gregg's bot would handle offense, while I would handle defense. The result was GoalBot, with one mission -- prevent the enemy from scoring!
My solution was to deploy a 2' "fence", made of long axles and liftarms, from one side of my bot. The folding fence was held to the sides of the bot by a motor pulling on strings, keeping the initial bot configuration within the required 8.5" x 11" footprint. Releasing the motor allowed rubber bands to unfold the fence. Large racing "slick" wheels gave plenty of traction and helped prevent being pushed from in front of the goal.
This bot was enormously successful; the low number of enemy goals scored, the "double teaming" required to push it out of the way, and the consternation raised in the opposing team. The crowd reaction when the fence first unfolded was worth all the effort!
For the later MathCounts competition, I added drop-down "legs" that deployed when the fence was released. This helped to discourage opponents from getting close enough to push the bot out of the way. |
| TransformBot -
Mar. 2, 2002 |
|---|
| Image Not Available |
This was our first RC tabletop battle. Our bots had to stay on a round tabletop, and each had to fit on a standard 8.5" x 11" sheet of paper. Most of the bots turned out to be low, heavy, high-traction affairs -- designed to win a shoving match.
I returned to the lift bot idea with a twist: I used some borrowed gearbox pieces to create four lifters between the main center module and drive modules. In the initial configuration, everything was flat on the table; at the press of a button, however, twin motors turned worm gears on each pair of lifters, raising the center module and pulling the drive modules inward. The bot's shape change would lift opponents slightly, breaking their traction and allowing them to be pushed off the table. In a recurring theme, front/back symmetry and reversible controls made driving (and winning) easy.
With its dynamic action and effective results, this bot was fun for the kids to drive when we handed them the controllers. The high traction requirement made it a little slow; some quicker opponents were able to evade the lifts. Defeats were usually the result of bad driving more than being out-muscled. |
| DragBot, FastBot -
Oct. 17, 2002 |
|---|
| Image Not Available |
For a change, we decided to solve an engineering challenge rather than a combat challenge -- build the fastest line-following dragster. I built two entries, DragBot and FastBot.
From the start, I wanted an excuse to build a multi-gear transmission. The final result was a three-speed, one-way affair -- it could shift to higher gears, but could not downshift by itself. A worm gear moved a frame along an axle; the frame contained a gear train connecting the drive pinions to the output gears. Since the output gears had different diameters, different ratios (and different speeds) were achieved. A rotation sensor was used to determine when a "shift" was complete; a second sensor was used to compute speed and determine when an upshift was necessary.
The tricycle wheel arrangement was steered by a tiller bar controlled by another motor, under the control of a light sensor. Rubber bands (and the angle of the front wheel's forks, similar to a bicycle's) helped auto-center the wheel and reduced the work needed to go straight.
Although it was the only bot to actually successfully perform line following, it was not the fastest bot; the transmission (and required motors/sensors) made it just too heavy. Using fixed motors & gear ratios proved to be the winning design.
"FastBot" had no RCX, relying on dead reckoning and a worm-adjustable front wheel to go straight. It used two old-style 9V motors (no gear reduction), three battery boxes and numerous wires to deliver 18V to each motor. A long axle connected to a pole-reversing switch on the top turned everything on & off.
This bot was an experiment in overreving the motors. With no load, 18V on the motors spun them fast enough to throw the rubber tires right off the wheels! With three battery boxes, however, the bot was extremely heavy. On race day, the bot's motors stopped running and, fearing burnout, the bot was sidelined. Later experimentation showed that these motors stopped working under high loads, even at 9V: power would need to be cut & restored to get them to spin again. Had I possessed two spare gear-reduced 9V motors, it certainly would have been FastBot.
This competition required the construction of 30' of lined track, as well as 6' test segments for each participant for at-home testing & development. These were constructed from colored electrical tape and a roll of waxed freezer paper. Blue & black electrical tape were found to give the highest contrast (in light sensor readings) against the white paper background. Making the track turned out to be the hardest part of preparing for the battle! |
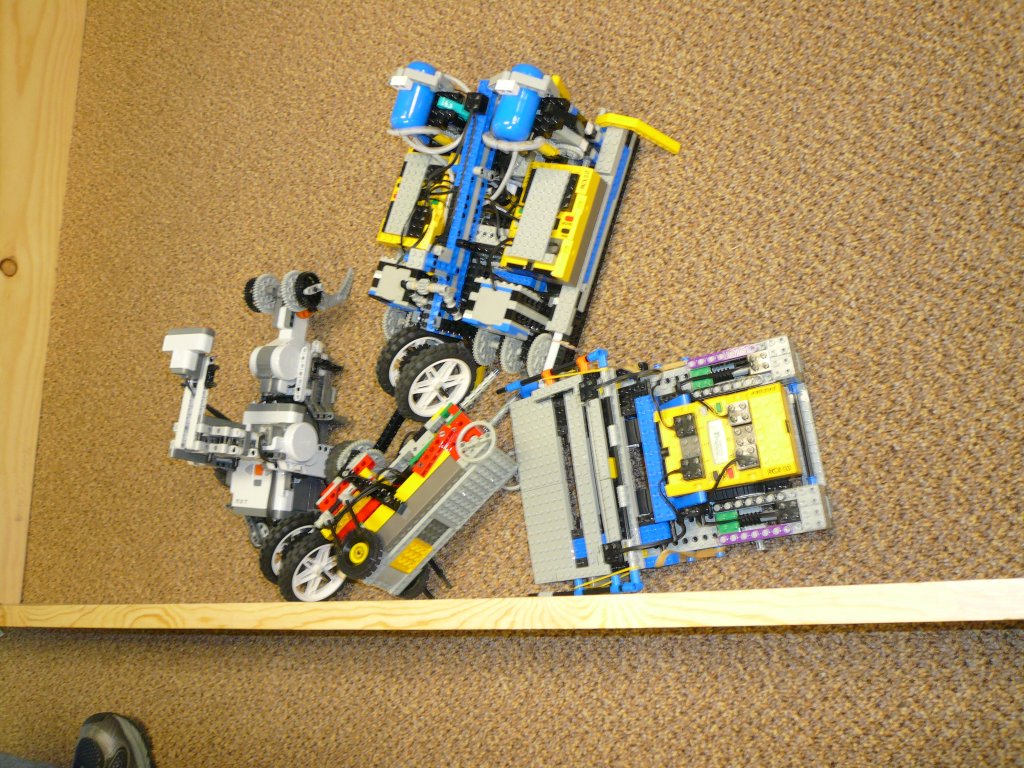
| PneumoBot -
Jan. 23, 2003; Feb. 1, 2003 |
|---|
| Image Not Available |
Another arena battle, another lift bot from Mr. Petersen! The "fit on a sheet of paper" rule once again in play, I decided to try out the Lego Pneumatics elements.
A liftarm was connected to two large pneumatic cylinders. These were connected to a control valve, which in turn were connected to two reserve air tanks on the top of the bot. The bot's central tower is the pneumatic power source: an air compressor made of two large manual air pumps and two 9V gear-reduced motors. These air pumps were synchronized by gears so the pump springs worked in opposition, largely cancelling their effects. (Since one of the pumps was borrowed, I did not remove the springs!)
In addition to the two drive motors, a fifth motor mounted on the side of the air compressor turned a shaft/elliptic cam assembly that actuated the control valve. The RCX (mounted at the bot's lower rear) controlled the two drive motors (buried in the main body under the lifting arm) and the pneumatic control valve. Two battery boxes (one over each drive wheel) drove the two air compressor motors continuously in battle, maintaining top pressure throughout the competition.
With two hammer bots also in the competition, some small damage (mashed plastic) was sustained during the Jan. 23 bout. This led to the covering of all horizontal surfaces with smooth tiles, and hinged plates covering the power switches on the battery boxes. (I didn't want someone deactivating the air compressor during the battle!)
The pneumatics worked amazingly well in combat. With the hissing of actuating valves & cylinders (and the traditional black/blue color scheme), it was sufficiently menacing to be a real crowd pleaser. Opponents were flipped with impunity; the only damage suffered was the loss of the "flair" minifig pilot to Gregg's hammer. The kids at MathCounts found it easy & fun to drive. |
|
|
|
|
|
|
|
|
|