|

|
 |
Profile: Scott Oster
|
 |
|
|
|
|
| Bio |
![]() |
Tips |
![]() |
Bots |
![]() |
|
|
|
|
|
|
| Shazbot -
September 25th, 2000 |
|---|
 |
Shazbot was a simple bot designed to lift other bots with its forward lifting arm.
See the Code |
| Shazbot II -
October 9th, 2000 |
|---|
 |
This was a last minute entry. Ok...so it is really the same bot as the last one, but with a major software bug fixed.
See the Code |
| Flippy -
December 15th, 2000 |
|---|
 |
This bot could operate on either side. It was meant to counter the recent offensive craze of flipping one's opponent.
See the Code |
| FNF -
January 9th, 2001 |
|---|
 |
FNF stands for "Function Not Form". This bot's objective was to simply get another bot on its platform and shove it off the table. I didn't have enough touch sensors so it didn't properly stay on the table.
See the Code |
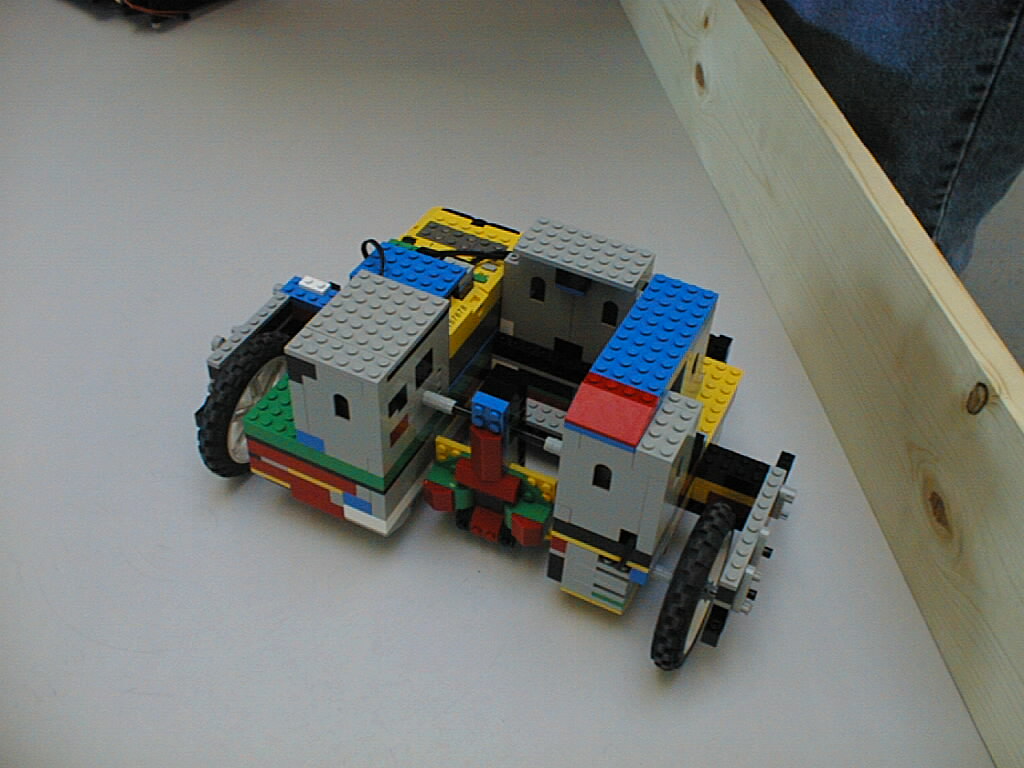
| Grayskull -
January 24th, 2001 |
|---|
 |
This bot was meant to lure other bots up on its treads and flip them over with its jousting lance.
See the Code |
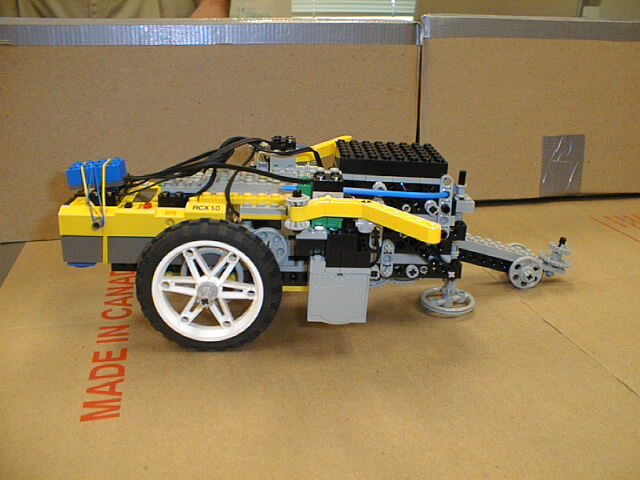
| LifTor -
February 23rd, 2001 |
|---|
 |
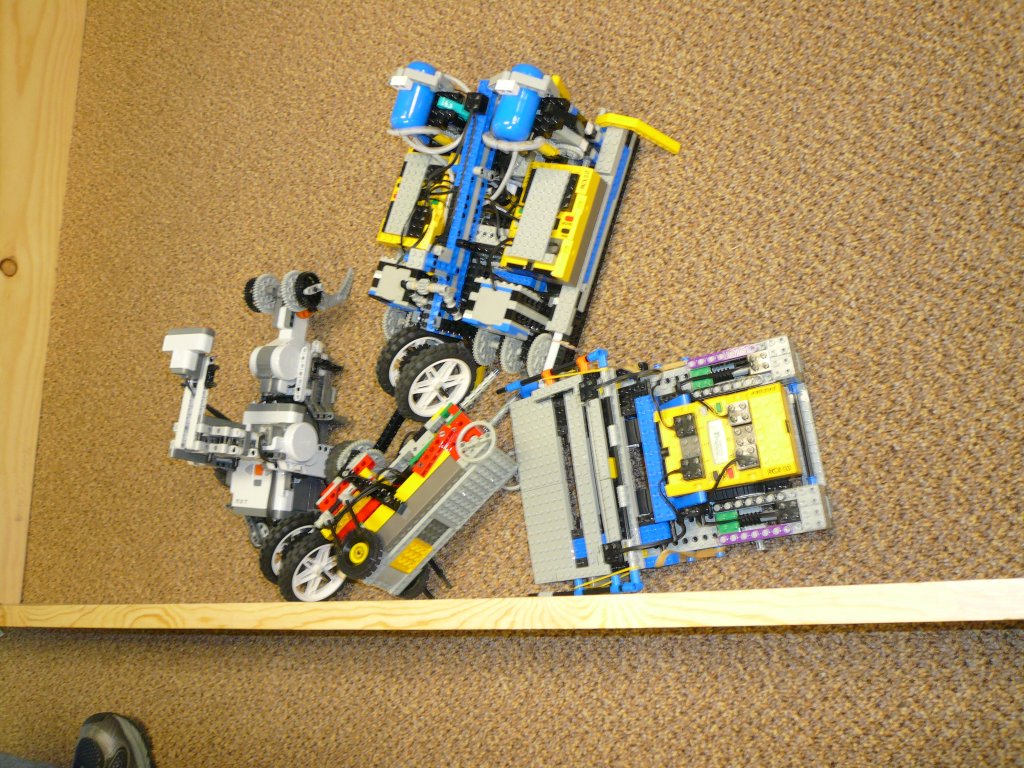
This was my first RC entry. Since I didn't have to worry about the limitations of the bot sensing its environment, I was able to try a more elaborate offense. This bot had a large lifting arm that was very powerfully geared. This was a rework of the "Shazbot" concept. Unfortunately the arm broke under heavy stress. Fortunately, it was also designed defensively with a very low profile. |
| Striker -
February 2nd, 2002 |
|---|
 |
The soccer battle was a lot of fun. This bot was meant to push the size constraints to a max and act as a good defensive wall with its flat surface. It also had a very effective kicking mechanism that could propel the ball a great distance with excellent accuracy. The kicker could also work in reverse to swipe the ball from others and hide it, in a completely safe holding area. Check out the videos for some great live action shots. |
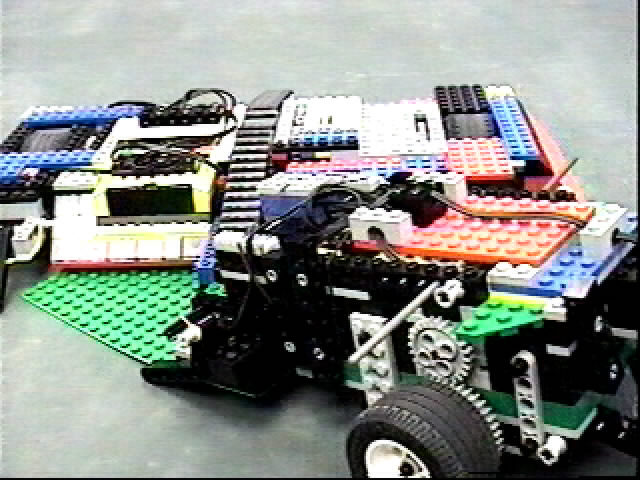
| Zugzwang -
March 2nd, 2002 |
|---|
 |
This bot's concept was simple: no matter how good a bot was, if it wasn't on the table it could be pushed off easily. It took advantage of its light weight and could easily scurry away from the larger bots. It was very successful; it was able to over power bots of equal or lesser size, and those that it couldn't push off, it could easily run away from. Due to some earlier problems with bots running away from lack of IR, this bot had override touch sensors that prevented it from driving off the table. Although it rarely was the only bot remaining at the end of a round, it brought many a battle to a draw. |
|
|
|
|
|
|
|
|
|